Эльчин Барат оглы Искендеров, кандидат технических наук, доцент, докторант,
Азербайджанский государственный аграрный университет
Обработка почвы, осуществляемая в целях получения выровненной поверхности поля с мелковатой структурой, сохраняющей влагу и создающей наиболее благоприятные условия жизнедеятельности корневой системы сельскохозяйственных растений, требует разработки принципиально новых конструкций рабочих органов. В частности, среди активно действующих рабочих органов следует выделить зубья вибрационных борон, которые отличаются способностью хорошо разрыхлять и выравнивать почву, не вынося нижние слои на поверхность, что немаловажно с точки зрения защиты и сохранения плодородия почв [1–3].
Однако наряду с этими преимуществами известные конструкции вибрационных борон имеют существенный недостаток: они забиваются растительными остатками на засоренных участках, в результате чего оказываются неэффективными и даже неработоспособными. Этот существенный недостаток сдерживает освоение вибрационных борон в различных отраслях растениеводства.
С целью повышения надежности и качества работы, а также уменьшения сопротивления почвы и упрощения конструкции устройства разработана вибрационная борона, существенно отличающаяся от зарубежных аналогов механизмом привода зубьев и возможностью самоочищения их от зависших и забившихся растительных остатков. Как видно на схеме (рис. 1), колеблющиеся брусья бороны имеют вибратор в виде ударно-кулачкового механизма с диаметрально расположенными копрами, которые осуществляют силовое замыкание и размыкание. Копры 4 с роликами 5 на концах обоих валов 6, вращаясь в разные стороны и поочередно соприкасаясь с упорами 7 на брусьях 8, приводят их в возвратно-поступательное движение в противофазах относительно друг друга [4].

Зубья 9 в свою очередь вращаются в подшипниках качения вокруг вертикальных осей под воздействием силы сопротивления почвы то в одном, то в другом направлении и самоочищаются от сорняков в процессе работы.
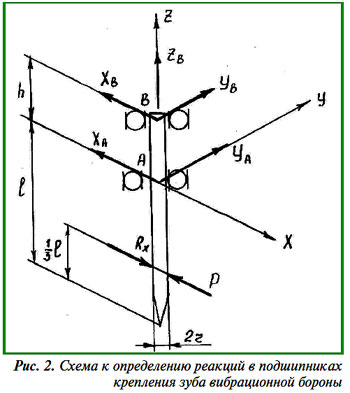
При этом, исходя из условия равновесия самоочищающегося зуба вибробороны (рис. 2), сила тягового сопротивления почвы Rx направлена противоположно линии абсолютной скорости зуба и движущей силы Р, с учетом действия которой определяем реакции в подшипниках А и В зуба, выбрав начало координат в точке О вертикальной оси вращения подшипника А:

Составим пять уравнений равновесия, беря проекции сил на оси Х, У и моменты относительно осей Х, У, Z:
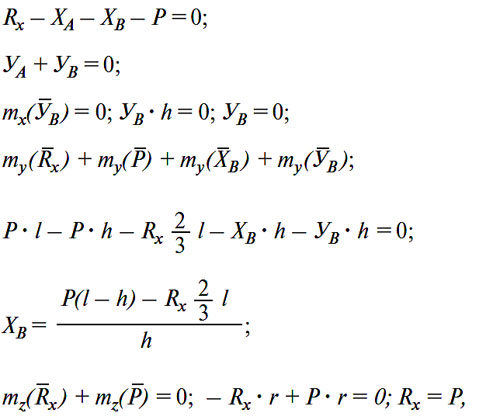
где l, h – соответственно длина зуба и высота его крепежной части между подшипниками.
Решив совместно полученные выражения, получим значения реакций в подшипниках А и В:
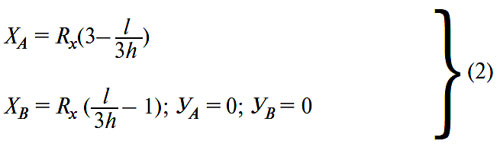
Полученное выражение (2) показывает, что реакцию XB подшипника В можно исключить при соответствующем подборе геометрических размеров l и h, но в этом случае на подшипник А будет действовать усилие, равное утроенной величине тягового сопротивления Rx, приходящегося на зуб. Поэтому наличие второго подшипника В более желательно с точки зрения равномерного перераспределения Rx. Например, при условии h=1/6 l получим равные нагрузки на оба подшипника:

Далее применим известную формулу тягового сопротивления для черенкового ножа в полученном нами выражении (2) для зуба вибрационной бороны:
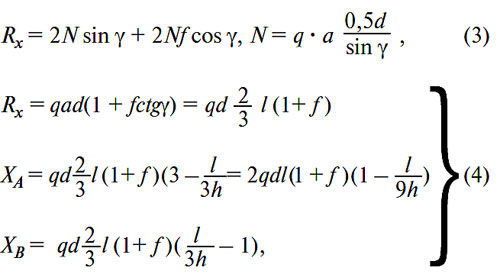
где N – нормальная реакция от давления почвы; f – коэффициент трения почвы о цилиндрическую поверхность зуба; 2γ – угол заострения (раствора) для зуба, принимаем равным 90° по касательной к окружности зуба (γ = 45°); q – давление почвы на 1 см2 боковой цилиндрической поверхности зуба; а – глубина обработки, принимается равной 2/3 длины зуба; d – диаметр (толщина) зуба круглого сечения.
Полученная формула справедлива для случая, приравниваемого к равновесному невращающемуся зубу вокруг вертикальной оси, когда он испытывает двухстороннее давление согласно формуле (3). В конкретном случае вращения зуба вокруг вертикальной оси формула (4) принимает вид:
Формула (5) берется в основу расчетов при проектировании вибрационных борон с вращающимися вокруг своих осей и самоочищающимися зубьями.
Источник: журнал «Аграрное обозрение», №1, 2011 г.
